Theory of Operation¶
The moteus controller is intended to drive 3 phase brushless motors using field oriented control. It has an integrated magnetic encoder for sensing the rotor position, 3 half-H bridges for switching power to each of the three phases, and current sense capability on each of the three phases.
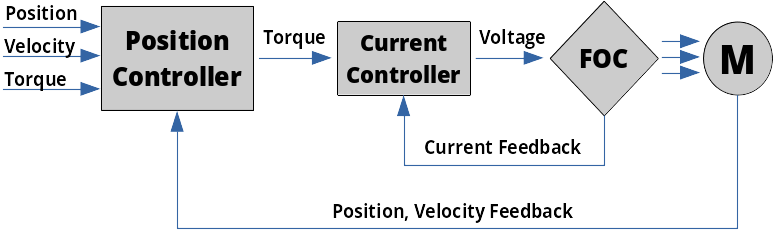
The primary control mode, labeled as "position" mode in the rest of this document is a two stage cascaded controller, with both running at the switching frequency (by default 30kHz).
The outermost stage is an optional limited acceleration and velocity trajectory planner. Within that is an integrated position/velocity PID controller with optional feedforward torque. The output of that loop is a desired torque/current for the Q phase of the FOC controller.
The inner stage is a current mode PI controller. Its output is the desired voltage value for the Q phase. Then the magnetic encoder is used to map the D/Q phase voltage values to the 3 phases of the motor.
More precisely, the "Position Controller" implements the following control law:
acceleration = trajectory_follower(command_position, command_velocity)
control_velocity = command_velocity OR control_velocity + acceleration * dt OR 0.0
control_position = command_position OR control_position + control_velocity * dt
position_error = control_position - feedback_position
velocity_error = control_velocity - feedback_velocity
position_integrator = limit(position_integrator + ki * position_error * dt, ilimit)
torque = position_integrator +
kp * kp_scale * position_error +
kd * kd_scale * velocity_error +
command_torque
And the "Current Controller" implements the following control law:
current_error = command_current - feedback_current
current_integrator = limit(current_integrator + ki * current_error, ilimit)
voltage = current_integrator + kp * current_error
Since PID scaling for the position mode loop can be adjusted on a
cycle-by-cycle basis with the kp_scale and kd_scale terms, this
allows you to operate the controller with full
position/velocity/torque control, or velocity/torque, or just torque,
or any combination seamlessly throughout the control cycle.